Fahrsimulatoren
Hochimmersiver & Statischer Fahrsimulator
Die Ausstattung der Auto Mobil Forschung Dresden GmbH dient zur Objektivierung von Fahrzeugeigenschaften auf Gesamtfahrzeug-, System- sowie Komponentenebene. Neben eigenen Prüfständen, stehen die Prüfstände des Lehrstuhls für Kraftfahrzeugtechnik, im Fahrzeugtechnischen Versuchszentrum, zur Verfügung. Diese Landschaft dient als Parametrierstraße für Gesamtfahrzeugeigenschaften sowie die Projektion dieser auf System und Komponenteneben. Dazu dienen auch durchgängige Mess- und Simulationswerkzeuge.
Für die Interaktion mit dem Fahrer / Insassen, sowie zur Subjektivbewertung von aktiver Fahrsicherheit und Fahrzeugeigenschaften, steht bereits heute ein statischer Fahrsimulator zur Verfügung. In Kürze wird zusätzlich ein frei fahrender hoch immersiver Fahrsimulator in Betrieb genommen. Für beide Felder, Objektivierung von Fahrzeugeigenschaften sowie Subjektivbewertung, stehen eine große Bandbreite an Know-how, Methoden und Simulationsmodelle zur Verfügung.
Hochimmersiver Dynamischer Fahrsimulator
Mit voranschreitender Automatisierung in der Automobilbranche wandelt sich nachhaltig die Rolle des Fahrers. Hierbei ist zu gewährleisten, dass Mensch und Maschine möglichst effizient, kooperativ und unmissverständlich miteinander arbeiten.
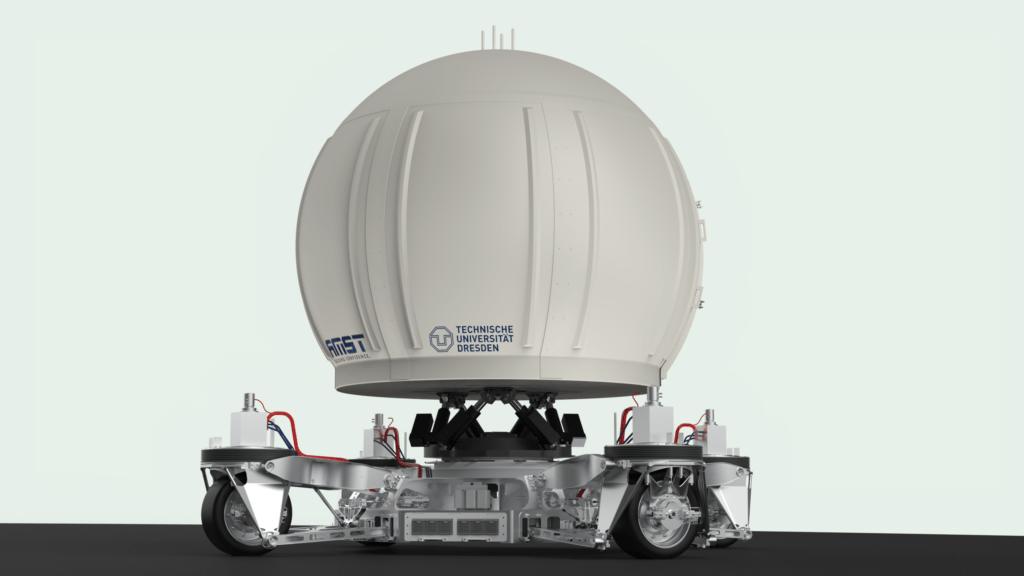
Da der menschliche Faktor ausschlaggebend für diese Untersuchungen ist und nicht ausreichend umfänglich simuliert werden kann, stellen Fahrsimulatoren ein nicht verzichtbares und maßgebendes Werkzeug dar. Insbesondere die Nachbildung von Fahrmanövern in sicherheitskritischen Fahrsituationen muss so erfolgen, dass der Fahrer sich realistisch in eine Fahrsituation versetzt fühlt. Überzeugende Immersion, also realistisches Empfinden der Beschleunigungen und Richtungsänderungen, können bisherige Fahrsimulatoren nur bei wenigen Manövern bieten. Um den Anforderungen der kommenden Fahrzeugentwicklung gerecht zu werden, setzt die TU Dresden das weltweit einzigartige Projekt „hochimmersiver Fahrsimulator“ um. Diese Fahrsimulatorentwicklung ermöglicht erstmals eine realistische Wahrnehmung des Fahrzeugverhaltens.
(Simulator befindet sich noch im Aufbau und steht Q1/24 als Entwicklungswerkzeug zur Verfügung)
Bewegung: – 10 FHG (Hexapod, Giergelenk, Bewegungsplattform) – +/- 1g reale Beschleunigung (via Bewegungsplattform) – 70m x 70m Bewegungsraum (bei Bedarf erweiterbar) Visualisierung: – Field of View: 225° x 40° – 3 x 2560 x 1600 Pixel Audio: – 5.1 Kanal Audioanlage HMI: – Frei programmierbare Displays (Instrumentenkombi, Navigation, ADAS, …) – Frei belegbare Schalterkonfiguration – Seat Shaker – Ansteuerbarer Gurtstraffer – Force-Feedback Pedale und Lenkrad – Lenkrad mit Hands-on-detection und frei ansteuerbaren Leuchtring – Kontaktloses Head & Eye-Tracking |

Statischer Fahrsimulator
Der statische Fahrsimulator dient als Entwicklungs- und Rüstwerkzeug für Probandenstudien am dynamischen Fahrsimulator. So können prospektiv wertvolle Informationen bei der Entwicklung, Applizierung und Umsetzung von Simulatorstudien gewonnen werden. Dabei werden die Domänen der Visualisierung, Akustik und Haptik adressiert. Lediglich die Propriozeption kann aufgrund der fehlenden Bewegungsaktuatorik nicht integriert und untersucht werden.
Die angestrebte hohe Gleichteilverwendung (Software & teilweise Hardware) soll im zukünftig avisierten Parallelbetrieb der Fahrsimulatoren eine Übertragbarkeit der gesamten Studieninhalte und deren Vorbereitung gewährleisten. Durch diesen Frontloading-Prozess kann später eine Minderung der finanziellen und zeitlichen Ressourcen bei Fahrsimulator-Projekten erreicht werden. Für Studieninhalte bei denen die Propriozeption eine untergeordnete Rolle spielt, kann der statische Fahrsimulator auch als „Stand-Alone“ Lösung eingesetzt werden.
Visualisierung: – Field of View: 170° x 50° – 3 x 25600 x 1600 Pixel Audio: – 4 Kanal Audioanlage HMI: – Frei programmierbare Displays (Instrumentenkombi, Navigation, ADAS, …) – Frei belegbare Schalterkonfiguration – Force-Feedback Pedale und Lenkrad – Kontaktloses Head & Eye-Tracking |