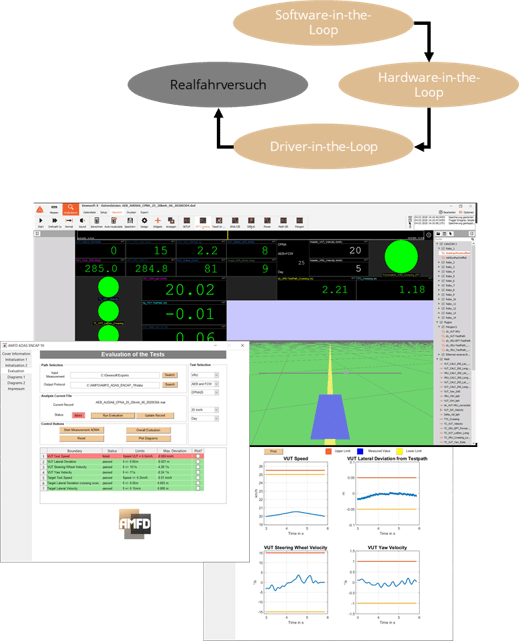
applikationsspezifische Implementierung geeigneter Messsysteme (z.B. zur Ermittlung von: Kurs-, Wank- und Nick- Winkel / Raten, Position des Fahrzeugs, Schwimmwinkel, Beschleunigungen in x-, y- und z- Richtung, Geschwindigkeiten in x-, y- und z- Richtung, Lenkwinkel und Lenkgeschwindigkeit, etc.)